Autonomous Navigation in Inland Waterway Transport
The objectives of the ELLA (Model-Scale Development Platform for Maneuver Automation) research project are to develop and operate a watercraft as an innovative test bed. This vessel will autonomously plan and execute docking and undocking maneuvers, as well as lock passages and bridge crossings, in a test field. The vessel’s appearance is that of a scaled-down version of an inland waterway vessel (1:6 scale). A major milestone was reached with its delivery and christening in March 2023. Following this, work began on the final outfitting of the vessel and the installation of the systems. Trial operations will commence thereafter.
ELLA's christening on 3/3/2023 (Source: DST e. V.)
Particular challenges for ships with automated navigation include maneuvering in narrow channels and docking and undocking in ports and locks. While guidelines for planning a ship’s course and speed during transit through a canal or in flowing waters are relatively straightforward to define, this is no longer the case for port and lock maneuvers. A given target position, such as a pier, can usually be approached via various maneuvers. The best strategy depends not only on the ship and its current load condition but also on the current environmental conditions.
In the ELLA project, a development platform specifically designed for automated maneuvering is being developed, built, and deployed in a test field. The vessel and test field serve as a learning environment for an artificial intelligence system that, based on manually performed maneuvers and its own test runs, learns step by step to plan and execute the required maneuvers. At the end of development, the system should be capable of reaching a specified destination independently and safely. The project results can then be transferred to real inland waterway vessels, taking into account the laws of similarity: Through the scale-accurate representation of the hull shape as well as the propulsion and maneuvering systems, the handling characteristics of a typical cargo motor vessel are realistically simulated.
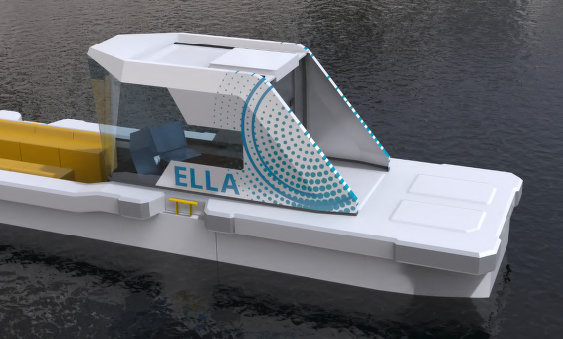
Rendering of the cabin structure designed for one person (Source: DST e. V.)
A virtual environment is used to generate results for later use even before the development platform is completed. Furthermore, sensors such as laser scanners are also to be represented virtually. This allows the future real-world design to be tested as early as the development phase. The programmed algorithms for environmental sensing and path planning can also be tested in a virtual environment across a much wider range of application scenarios. This includes, for example, the targeted simulation of rain or fog. Significant added value can be generated, particularly for the use of machine learning, by allowing newly learned maneuvering patterns of an artificial intelligence system to be tested without risk.
Given current challenges, such as the shortage of skilled nautical personnel, automating as many onboard tasks as possible is a way to strengthen the future viability of waterborne transport, particularly in competition with other modes of transport such as road and rail. The ELLA project will make an important contribution in this regard. In particular, the vessel will remain available beyond the project’s duration as a development platform and test bed for future research projects—for example, for assistance systems, automated steering systems, or specialized sensor technology.
Informations:
Project duration: June 14, 2021, to December 31, 2024







")