Virtual Testbed - Infrastructures and Technologies for Virtual Testing of Automation Functions
Sensor simulation for maritime automation
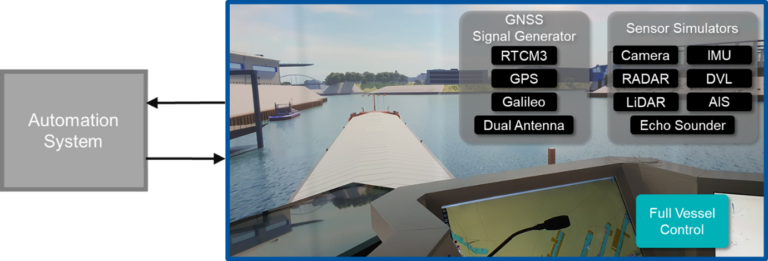
For the development and testing of ship automation systems, VeLABi provides simulators for a wide range of sensors. These include simulators for cameras, radar, LiDAR, inertial measurement units (IMU), Doppler velocity logs (DVL), AIS, and echo sounders. The sensors can be freely positioned and aligned on the ship models. The number of each sensor type is variable. Extensive parameterization allows the simulators to be calibrated to real sensors. A GNSS signal generator enables the generation of GPS and Galileo satellite signals for up to two antennas. Thus, VeLABi facilitates the development of localization algorithms in challenging and repeatable scenarios. All sensor simulators also allow for the manual or time-controlled simulation of sensor failures within the overarching scenario management.
Modern wind simulations
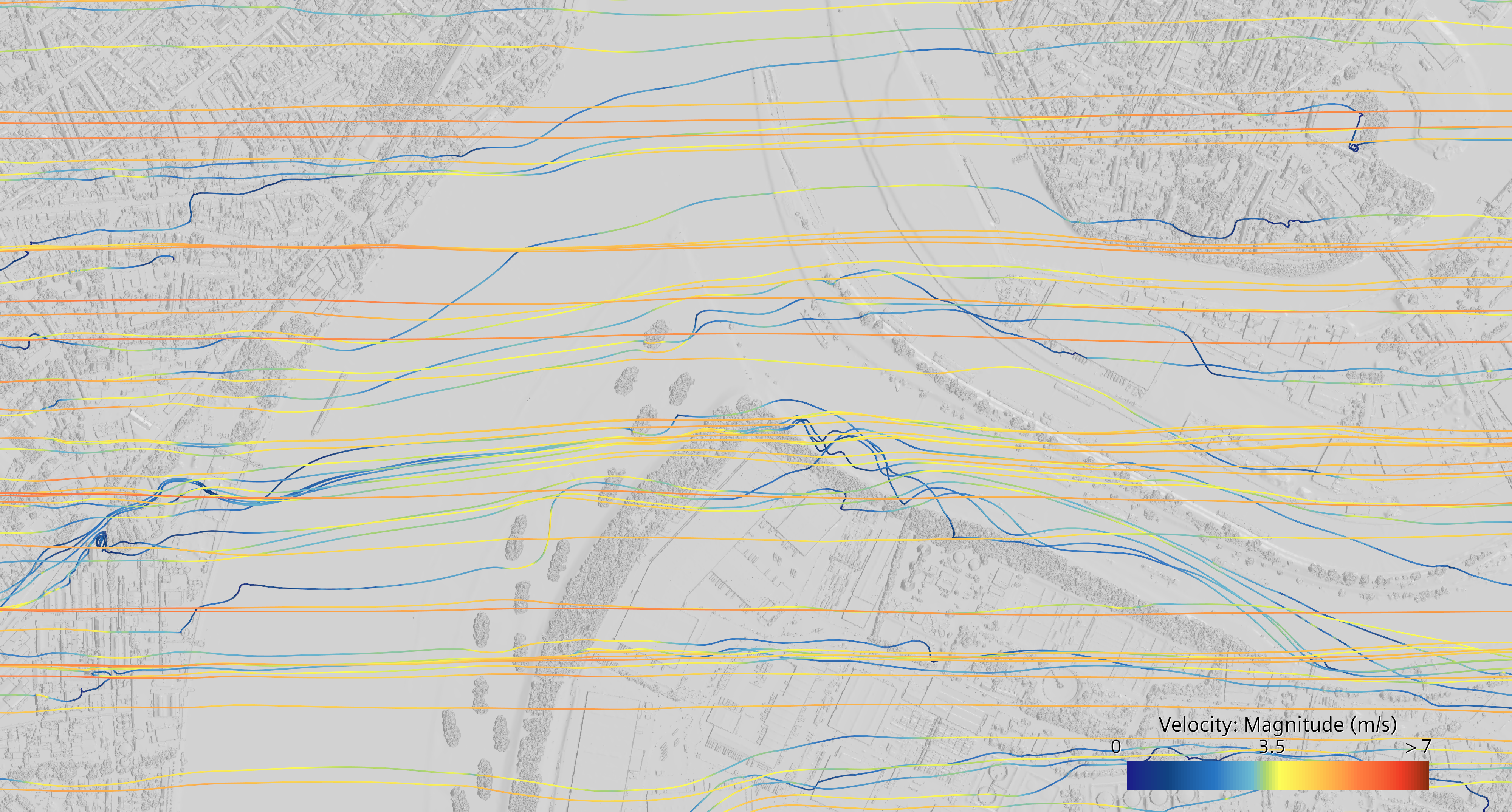
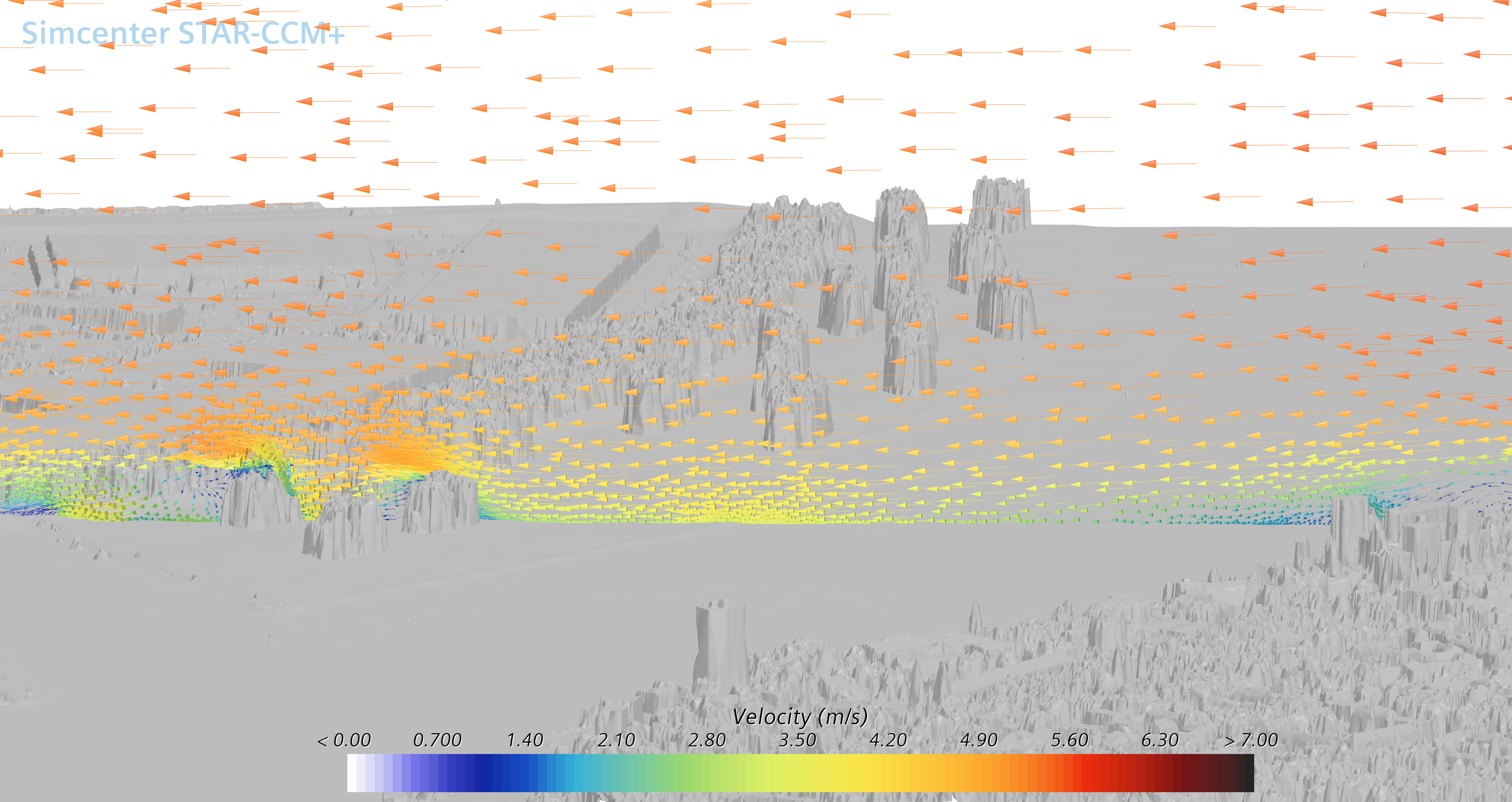
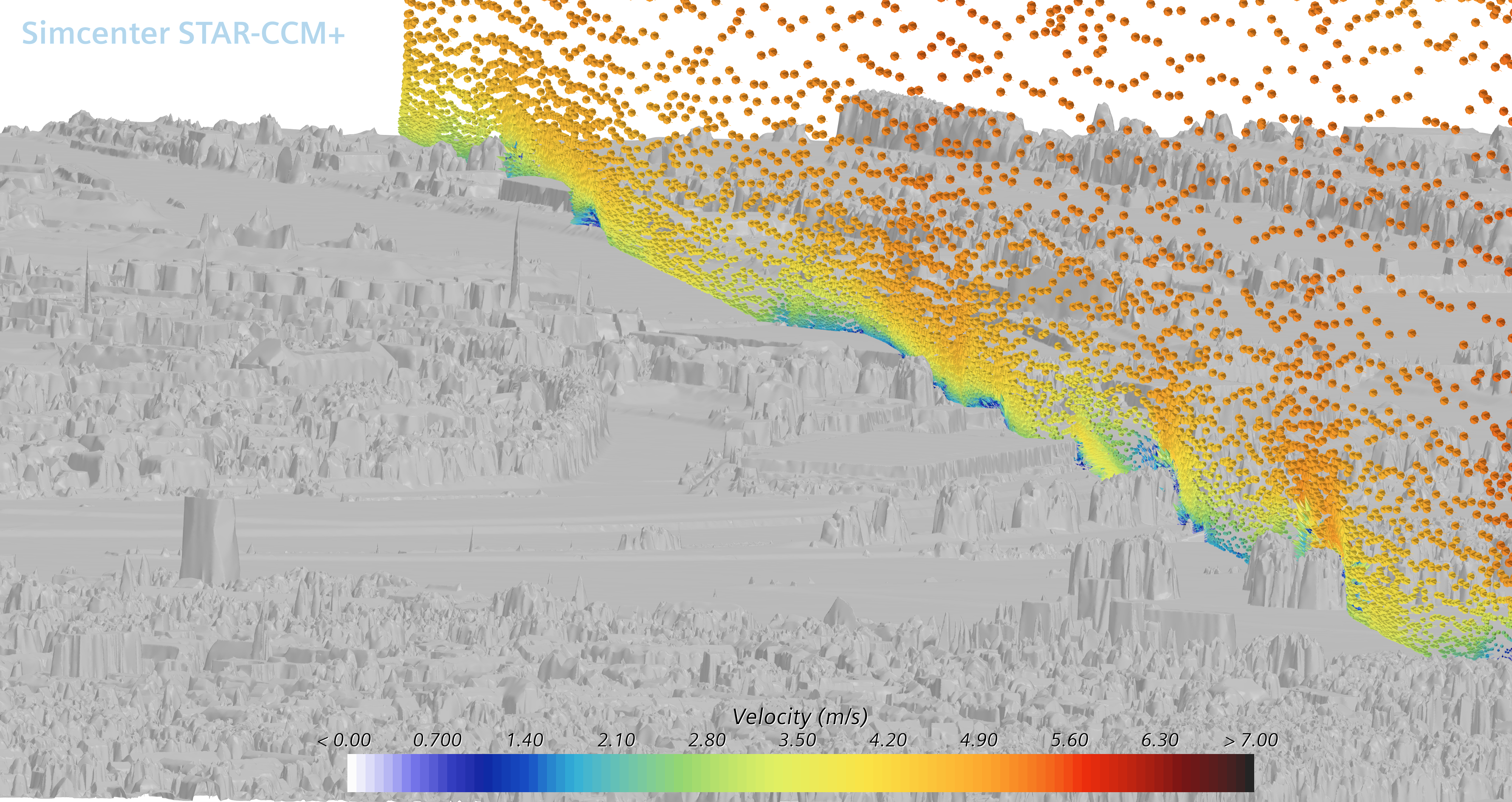
The simulations were performed on a 1:1 scale using a 6 x 2 km domain covering the Port of Duisburg, the Ruhr estuary, and a section of the Rhine. To accurately represent the wind, the atmospheric boundary layer model was used, which simulates natural wind flow. Turbulence was modeled using the K-Omega SST model. In the images shown here, a westerly wind of 4 m/s was simulated. The velocity can be read at any node in the domain. Shown are streamlines with the magnitude of the velocity and vectors that illustrate the direction and intensity of the wind in the computational domain. The simulations were performed using the numerical flow solver Siemens StarCCM+. This gives you something for the site.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}